
Masahiro Shimaoka 道木研究室

Shizuka Yokoyama 道木研究室

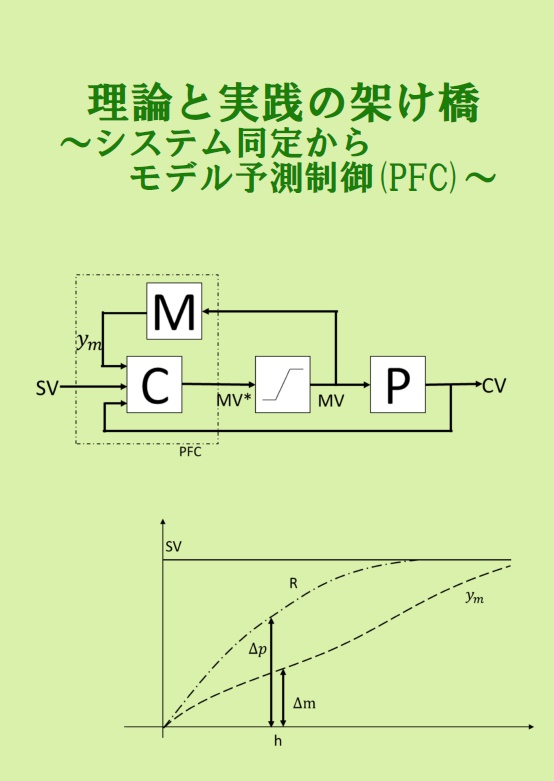
理論と実践の架け橋 システム同定からモデル予測制御 Pfc 仮空制御研究室 Booth
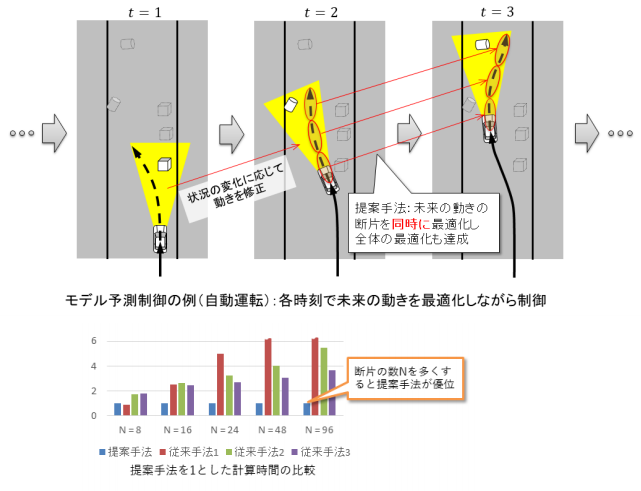
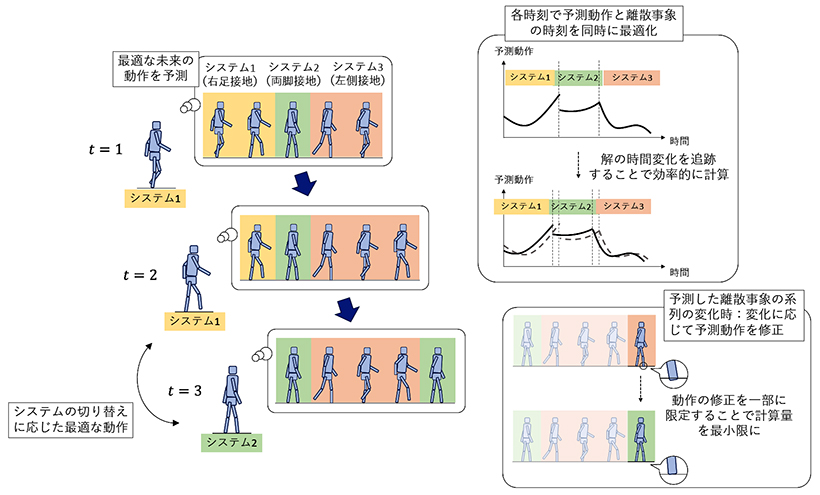
不連続な変化を伴う実時間最適制御の高速アルゴリズムの開発に成功 2足歩行ロボットなどの限界性能を引き出す手法 京都大学
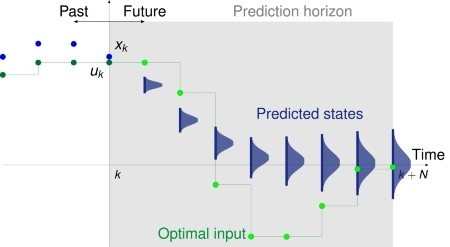
Model Predictive Control Mpc モデル予測制御 の技術分類 Myenigma
制御 イメージ

日経robo 制御工学にディープラーニング 日経robotics 日経ロボティクス
Masahiro Shimaoka 道木研究室

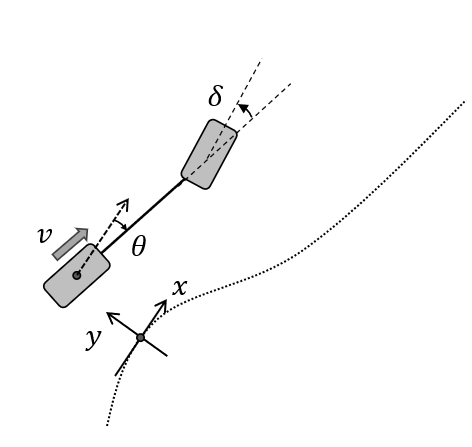
モデル予測制御 Mpc による軌道追従制御 Qiita
Masahiro Shimaoka 道木研究室

並列計算を活用した実時間最適制御の高速アルゴリズムを開発 テック アイ技術情報研究所
Tags:
Archive





